激光焊接机器人常见故障及解决方案
焊接机器人的组成
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人,它主要包括机器人和焊接设备两部分(fēn)。
其中,机器人由机器人本體(tǐ)和控制柜(硬件及软件)组成;而焊接装备,以弧焊及点焊為(wèi)例,则由焊接電(diàn)源(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分(fēn)组成。对于智能(néng)机器人,还应配有(yǒu)传感系统,如激光或摄像传感器及其控制装置等。有(yǒu)点焊、伺服、弧焊机器人。
焊接机器人存在的问题和解决措施:
1、出现焊偏问题:可(kě)能(néng)為(wèi)焊接的位置不正确或焊枪寻找时出现问题。
这时,要考虑TCP(焊枪中心点位置)是否准确,并加以调整。如果频繁出现这种情况就要检查一下机器人各轴的零位置,重新(xīn)校零予以修正。
2、出现咬边问题:可(kě)能(néng)為(wèi)焊接参数选择不当、焊枪角度或焊枪位置不对,可(kě)适当调整。
3、出现气孔问题:可(kě)能(néng)為(wèi)气體(tǐ)保护差、工件的底漆太厚或者保护气不够干燥,进行相应的调整就可(kě)以处理(lǐ)。
4、飞溅过多(duō)问题:可(kě)能(néng)為(wèi)焊接参数选择不当、气體(tǐ)组分(fēn)原因或焊丝外伸長(cháng)度太長(cháng),可(kě)适当调整机器功率的大小(xiǎo)来改变焊接参数,调节气體(tǐ)配比仪来调整混合气體(tǐ)比例,调整焊枪与工件的相对位置。
5、焊缝结尾处冷却后形成一弧坑问题:可(kě)编程时在工作步中添加埋弧坑功能(néng),可(kě)以将其填满。
焊接过程中系统常见的故障
1、发生撞枪:可(kě)能(néng)是由于工件组装发生偏差或焊枪的TCP不准确,可(kě)检查装配情况或修正焊枪TCP。
2、出现電(diàn)弧故障,不能(néng)引弧:可(kě)能(néng)是由于焊丝没有(yǒu)接触到工件或工艺参数太小(xiǎo),可(kě)手动送丝,调整焊枪与焊缝的距离,或者适当调节工艺参数。
3、保护气监控报警:冷却水或保护气供给存有(yǒu)故障,检查冷却水或保护气管路。
配套使用(yòng)豪克能(néng)消除应力机器人消除焊接应力

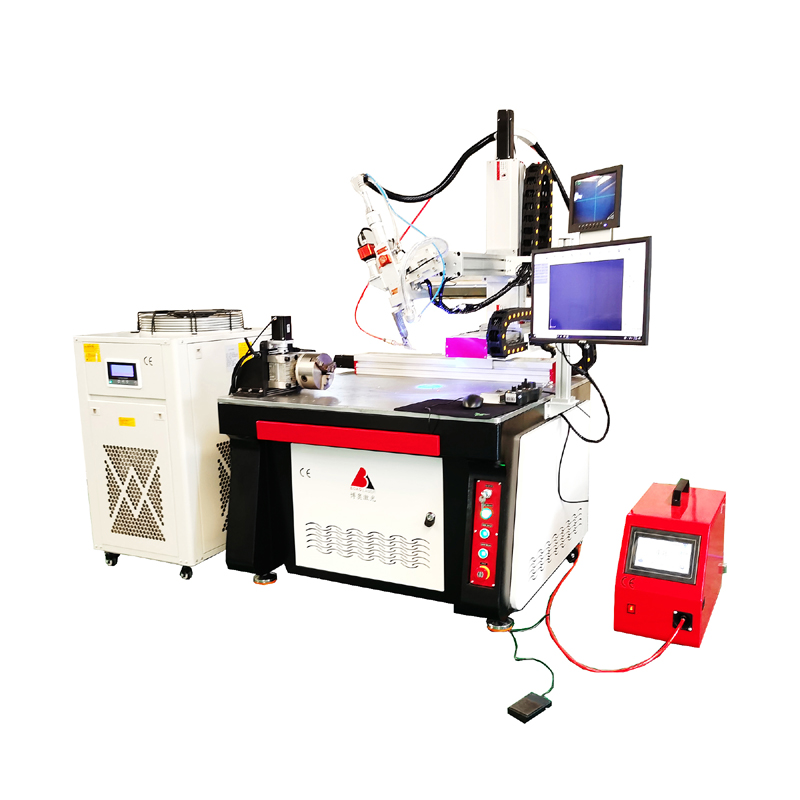
金属激光焊接设备 推荐:优惠多(duō) 聚划算 报价4007001618
【金属激光焊接设备】适用(yòng)于各种复杂的焊接,不同设备的点焊和1毫米厚的焊缝焊接;多(duō)路光纤模式,同时焊接多(duō)工位;
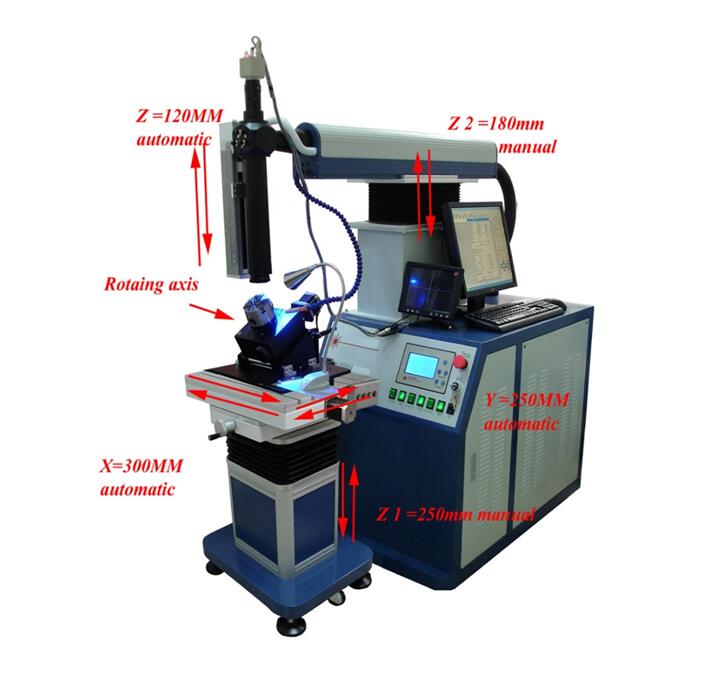
【模具激光焊接设备】适用(yòng)模具工业化,用(yòng)于精密模具的维修,如数码产品、手机、玩具、汽車(chē)、摩托車(chē)、模具等模具制造和成型行业;
【金银首饰激光焊接】主要用(yòng)于珠宝首饰、電(diàn)子元件等、通信、工艺品等行业;
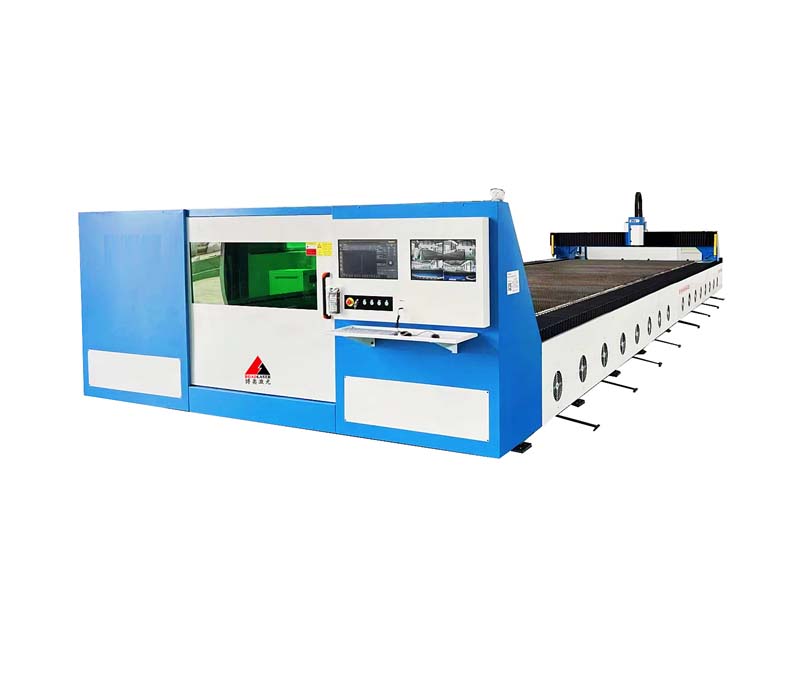
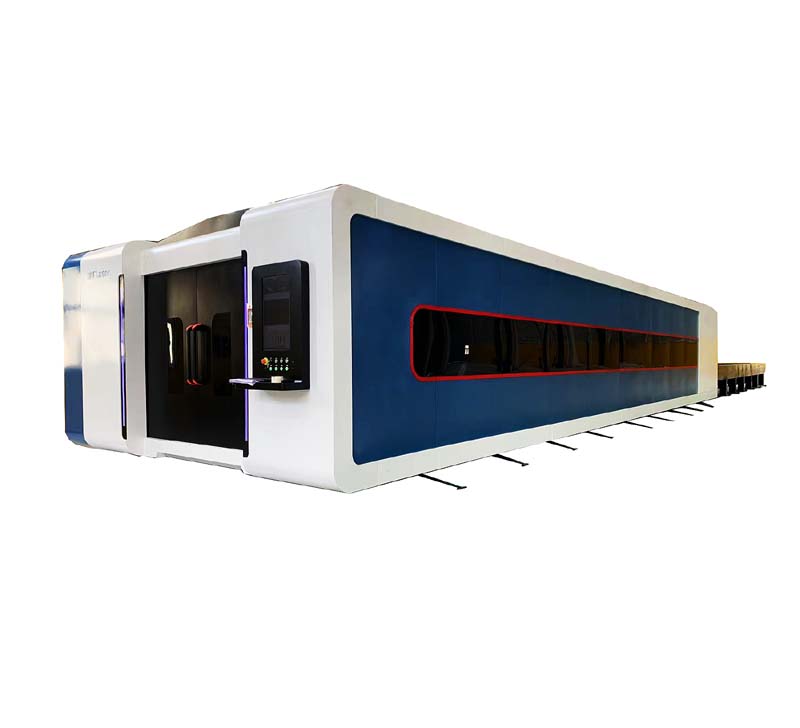
【大型激光焊接】应用(yòng)在汽車(chē)車(chē)身覆盖件类零件的组焊,如汽車(chē)車(chē)门、侧围、天窗、地板、前仓、后仓、行李箱盖。